Rotasi 3 Dimensi adalah berputarnya sebuah benda sebuah objek dari keadaan awal ke keadaan akhir. 3 Dimensi disini mengacu pada sudut euler atau tiga jenis sudut rotasi (ϕ,θ,ψ) pada sistem koordinat.
Roll(ϕ) adalah jenis rotasi yang dilakukan pada sumbu X
Pitch(θ) adalah rotasi yang dilakukan pada sumbu Y
Yaw(ψ) adalah rotasi yang dilakukan pada sumbu Z
Misalkan pada pesawat terbang dengan melihat kerangka acuan pada bumi, maka pesawat dapat berotasi pada sumbu X,Y dan Z secara simultan. Sebenarnya ada 6 kombinasi dalam melihat rotasi 3 dimensi ini (cek wiki)
Persamaan rotasi untuk kombinasi z,y,x

Persamaan tersebut terdiri dari rotasi pada masing-masing sumbu dalam R^3 berturut-turut yaitu yaw, pitch dan roll.
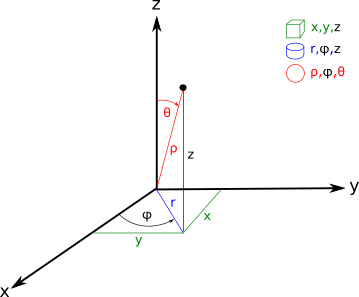
Tinjau 3 sumbu dalam R^3
Untuk Roll, Misalkan,

Rotasi pada sumbu X(Roll), maka gunakan YZ Plane, didapat,

Sehingga,

Untuk Pitch, Misalkan,

Untuk Pitch, Misalkan,

Rotasi pada sumbu Y(Pitch), maka gunakan XZ Plane, didapat,

Sehingga,

Untuk Yaw, Misalkan,

Rotasi pada sumbu Z(Yaw), maka gunakan XY Plane, didapat,

Sehingga,

Karena persamaannya adalah

Maka substitusi hasil dari rotasi tiap sumbu menjadi,

Daftar Bacaan:
http://control.asu.edu/Classes/MMAE441/Aircraft/441Lecture9.pdf (Spacecraft and Aircraft Dynamics)
https://en.wikipedia.org/wiki/Euler_angles#Rotation_matrix (Euler Angles)
https://www.nasa.gov/centers/dryden/pdf/88104main_H-1391.pdf (Derrivation and Definition of a Linear Aircraft Model)
https://www.youtube.com/watch?v=4srS0s1d9Yw (2.2 Rotation Matrices) https://www.youtube.com/watch?v=OYuoPTRVzxY&t=61s (Rotating Points Using Rotation Matrices)
https://www.nasa.gov/centers/dryden/pdf/88104main_H-1391.pdf (Derrivation and Definition of a Linear Aircraft Model)
https://www.youtube.com/watch?v=4srS0s1d9Yw (2.2 Rotation Matrices) https://www.youtube.com/watch?v=OYuoPTRVzxY&t=61s (Rotating Points Using Rotation Matrices)
Your post was really educational and perceptive. I appreciate you sharing your wisdom and understanding on the matter. I consider this profile to be essential reading IO Games. Fantastic. The exciting thing about multiplayer games in the genre is the chaos they create.
ReplyDelete